Thwackintosh
150g Thwackbot

Watch the build video here!
Overview
This robot never competed lol. it's best feature was as a gag in the Dreamphaze video.
Nah, that's harsh. This robot taught me valuable lessons about why high quality motors are worth it.
The basic idea of this robot was a Thwackbot, or a robot that uses its wheels to power a weapon. In this case, the two wheeled design allowed the robot to pivot a hammer down in front of it to attack. This robot would also be designed for the 150g "Fairyweight" class, which would be a fun new challenge for me.
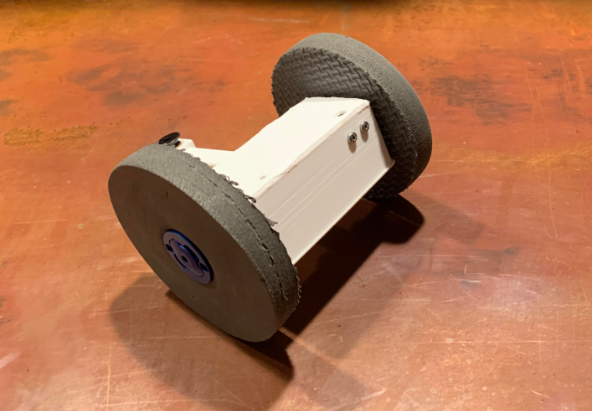
The wheels needed to be larger than Fingertech supplied, so I took a holesaw to some foam tiles. These were left over from the VEX Robotics (VRC) field I kept in my basement. After some sanding, they fit perfectly on the Fingertech hubs.
Disaster struck as the robot just kept spinning, and after a lot of troubleshooting, I discovered that the cheap N20_Gearmotors I bought had a massive variance in their startup voltages. Some motors would start spinning at less than a volt, some at nearly 5, which meant that they needed to be matched to each other to get a consistent driving experience. I performed all my testing by borrowing my brother's benchtop power supply, wiring the motors individually up, and slowly increasing the voltage from zero until the motor started to turn. I then noted the voltage on the motor itself with a marker, and packed it away.
This robot was still a nightmare to control, even after solving that problem, so I never bothered to enroll it in a competition.
Parts
- N20_Gearmotor (gear ratio lol)
- Malenki_Nano ESC/Receiver combo
- Fingertech_Power_Switch
- Lipo_Battery (2s 120mAh)
- Fingertech_Hubs (and wheels)